BEAR-4 - August 23rd, 2009Hi-Def Video from The Edge of Space. After many requests, here's another video with the 10 minutes leading up to the balloon burst. The BEAR 3 & 4 balloon flights were featured on the Discovery Channel, Daily Planet TV show on Sept 18/09 Check back for another video of launch preparations and recovery which will be posted as we find time. |
|
|
The balloon was launched at 7:44 AM, burst at 10:51 AM at 107,145 ft. and the camera landed via parachute at 11:40 AM, 89 miles from the launch site after a 3 hr. & 56 min. flight. The camera recorded a total of 4 hrs. & 22 min. of Hi-Def Video before it stopped recording 53 sec's after landing when its 32GB of memory was full. The only thing better would have been if the camera could have recorded for several minutes more to captured the sound of us approaching and video of us opening its Styrofoam container. The camera captured a nice view of a local TV Tower at 2:50 (min. & sec's into the video), 3:16 and several other times. The haze is from high humidity and it's unfortunate that the sky wasn't as clear as it was for SABLE-3. At 5:45 the camera is nearing 107,145 ft. where there's so little air to conduct sound that nothing is heard other than what vibrations are conducted through the supporting cords, Styrofoam box and camera body to the camera microphone, like the bursting of the balloon at 6:26. Balloon remains can be seen falling past the lens at 6:27 and then the fun begins as the foam box and camera inside is repeatedly struck by the antenna hanging below and the several pounds of latex remaining from the burst balloon as everything tumbles every which way back to earth at up to 7900 ft./min (90 mph) in the near vacuum until there's enough air for the parachute to start functioning. The beeping first heard at 9:13 is my car door alarm as I got out to watch the camera land and at 9:36 the camera catches those tracking it as we stand on the road and watch it pass by before landing a short distance away a few seconds later. This balloon flight was for Tomoya Kamiko from Japan who emailed on May 23rd after seeing the SABLE-3 photos to say that he would like "to take a photograph of the space, too!" and ask if I would help him send a Hi-Def Video Camera aloft . Tomoya didn't know any English at the time, but was willing to learn and come to Canada to do this so how could I say no. He didn't even have a video camera, but bought a Hi-Def one the day I agreed to help him and made travel plans to come for a balloon flight in August a few days later. |
|
|
|
Tomoya arrived on August 16th and the week was spent making an insulated box for his camera (left) and getting things ready for his balloon flight the following weekend.
Below - The same tracker and antenna used for SABLE-3 was installed in the lid of the payload box. |
|
Right - This photo taken after recovery shows how the camera was packaged and kept in place. The two 5 AA cell batteries were placed on each side of the camera, small foam blocks were placed in front and behind it, and the box was sized so the center piece of foam in the lid would keep the camera from moving vertically. A UV filter was used to keep water from entering the camera through its lens opening in the event of a water landing and a rubber sun shade screwed onto the filter and that fit the opening in the box tightly was used to keep water from entering the box through the opening. |
|
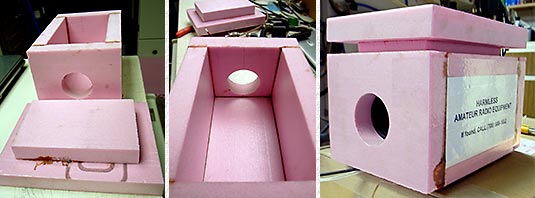

 Left - Final assembly on the morning of the flight. A portion of the
Left - Final assembly on the morning of the flight. A portion of the APRS antenna that hung below the package and can be seen giving the package a good
beating during the first half of the decent in the video is just below and left of the box.
APRS antenna that hung below the package and can be seen giving the package a good
beating during the first half of the decent in the video is just below and left of the box.|
Right - Tomoya gets an update from Garrett, VE6RKY, as to the location of his camera. Below - Watching the balloon pass overhead as it nears 100,000 ft. |
 |

 |
 |
 |
 We like to stay under or slightly ahead of the balloon and often stop to watch it, contemplate which direction it will head next or land and visit while we wait for the balloon to catch up. Below - Waiting for the balloon to burst at a location we feel will be very close to where the balloon will land. |
||
 |
|
 |
|
Above - The two with the large camera covered this and our BEAR-3 flight for the Daily Planet TV show on the Discovery Channel and (right) Tomoya prays for the safe return of his camera as James & Garrett are being taped while they track the balloon and it bursts. We stayed at this location
until the payload descended to about 50,000 ft., but then figured it would likely land further NW so got back on the road again and headed North. We then headed West, before reconsidering our latest prediction and heading back South, and then East, again until only a few miles from where we had
been waiting when the balloon burst. Left - An image from the payload camera video as we stood on the road watching it pass by. Upper & Lower Right - The wooded area next to the road where the camera landed under a fully deployed parachute even though, as usual, the remains of the burst balloon had become all tangled up in the parachute lines (as seen below). |
||

 By this time the payload was within a minute of landing and as we got out of our vehicles we watched it pass by and land a short distance away in a small clearing
near the edge of a small wooded area.
By this time the payload was within a minute of landing and as we got out of our vehicles we watched it pass by and land a short distance away in a small clearing
near the edge of a small wooded area. |
 |
 |
|
Tomoya was all smiles and happy to have his camera back, although he still didn't know its condition other than it was on as the lens shutter was still open. August 30, 2009 - Tomoya returned home today with his camcorder & video, digital camera, over 1000 still images & countless memories of his trip to Canada. Tomoya is a student in his early 20's and this was his first trip very far from home. He stayed with my wife & I during his visit and, considering he only knew Japanese 2 months earlier, his English was excellent. Tomoya participated in our BEAR-3 launch as well several days before his BEAR-4 camera flight. This may have been Tomoya's first big trip, but he certainly knew how to travel light and had everything packed in his carry-on baggage, which even included the remains of his burst balloon when he left along with 2 cameras, a lap-top and extra external hard drive.
My motto is "Leave Nothing to Chance", but this flight was put together rather quickly after Tomoya arrived from Japan and there simply wasn't time to test everything as I would have liked to. As a result, we had several problems, besides the camera one already mentioned, but we were lucky and everything worked out ok in the end. The problems started with the launch, which was actually done twice. The first time we ended up with too little lift which was hard to detect with the balloon tugging on the payload from the wind that had started to blow. Luckily the wind also kept the balloon from gaining more than a few feet of altitude before the payload encountered and got hung up in some trees a short distance away and we were able to fill the balloon with more hydrogen before trying again. We're still not sure where we went wrong the first time. Everything attached to the balloon is normally weighed before going to the launch site and then an equivalent weight is used while filling the balloon with gas to end up with the proper lift, but being short of time we ended up weighing things at the field and maybe setting the scale on the grass wasn't a good idea and it read lighter than it should have or perhaps an error was made converting between Kg and lbs. Whatever the case, we were very lucky this time as the expensive balloon could have easily been damaged and it just goes to show how important it is to take the time to check things and leave nothing to chance as there's seldom a second chance once a balloon is launched. The second problem started 20 seconds after launch when we realized altitude data was not being receiving. The balloon had been launched so it was too late to do anything about the problem and all we could do now was pack everything up as fast as possible, track the balloon using just latitude and longitude info and hope to keep it in sight to know when it burst. With rushing to assemble things, I thought the tracker may have been programmed wrong, but altitude data suddenly started to be received 15 minutes later. The data was a little inaccurate at first, but a minute later it indicated the balloon was 9900 ft. ASL (above sea level) & steadily rising at about 480 ft./min. All seemed well, but 25 min. later altitude data was lost again at about 22,500 ft. for another 39 minutes. Again, it took several minutes for the altitude data to start showing a steady rate of rise of about 600 ft./min. this time. The balloon was now at about 45,000 ft. and this was the last of our GPS problem. By now I had figured out what was most likely causing the problem which was later confirmed. I knew the Lassen iQ GPS receiver being used was more susceptible to interference than any of my other GPS receivers as it was the only one unable to work anywhere near my main computer, but it worked fine near other PC's and on several past balloon flights so I figured it would work fine again. I also knew the camera had a switching voltage regulator and knew what the problem was as soon as altitude data started being received and the GPS began working better as time went on. As suspected, and later confirmed, the camera had a variable, rather than fixed, frequency switching regulator that started out emitting RFI at a frequency which interfered with the GPS receiver, but was slowly changing as the battery voltage became less until it no longer affected the GPS. We were lucky that the GPS started working better, rather than worse and failing completely, but we had little choice, but to rush, with Tomoya here for such a short time and, again, it shows how important it is to take the time to test and check everything thoroughly and leave nothing to chance. What worried me more with the camera and tracker so close together was the tracker affecting the camera each time it transmitted. There was no time to check this out either, but again we were lucky and had no problem with this. There was only one other small problem which was with the
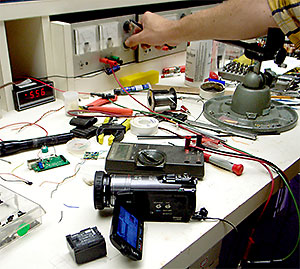
camera and could have been much worse, but again we were lucky and we should have taken time to ensure the camera's view wasn't affected by the foam around the hole it had to peer through and affects the corners of the image. Garrett created a perfect spot for his laptop in our vehicle by simply replacing the glove box with a home made wooden shelf. In addition to his laptop, a high-speed wireless modem, Garman Nuvi 350, a second GPS and several amateur radio transceivers were used to receive tracking data, talk with others and do everything else being done. With an internet connection, a laptop and Google Earth is all one needs, and my favorite way, to track a balloon and keep track of where the other vehicles in the group are, but Garrett was also using a Garmin Nuvi 350 and busy running a number of different programs to make landing predictions plus log and I-Gate received data to the internet for others. Feeding data from the tracking vehicles to the web was especially important as we would soon be out of range of any digipeaters and I-Gates where we would be going. And for those that keep asking how we track and make landing predictions, Garrett does a much better job of explaining what all he does then I can and his reply to one of those requests is HERE.
The success of this flight has others now excited to do what I've wanted to do for some time and future flights are being planned that will involve much more. Like a remote controlled package with multiple cameras and at least one with pan, tilt & zoom, that will transmit live video and flight data to provide a display (like seen HERE) to allow us to fly the payload during descent and with an auto-pilot to allow the payload to fly itself back home automatically if we decide to not do that, or can't do that, ourselves. And thanks to everyone that's sent ideas as to how to stabilize the payload and prevent it from spinning so much, but this flight was for Tomoya from Japan and there simply wasn’t time to prepare anything special for it and we have several ideas our self that we plan to try when a decent video camera is acquired. Like vertical fins that will work at lower altitudes where there’s enough air and can even be used to pan if tilted, by remote control, as there would be vertical air movement past them due to the balloon's constant assent (someone on the web once wrote about doing this). Vertical surfaces could be added to the first BEAR payload package quite easily and would add next to no weight by simply adding paper or saran wrap type plastic film between the two vertical antennas. Two gyros may also work and, by slowing or speeding up the rotational speed of a horizontal one, one could also be used to pan, even at altitudes where there's little air. Our next venture will likely be a flying wing which would likely make adding vertical fins difficult, but a gyro could be used on the way up and on the way down the wing would become stable once it encountered enough air for it to begin flying. |
||
 One concern is always the extreme cold at high altitudes
and that things will freeze, but everything was nice and warm when the payload container was opened with the camera and batteries dissipating about 3.6 watts. Next thing to check was if the camera was still recording and, if not, how much of the flight had been recorded and when the display screen
was opened we found that recording had already stopped due to the memory being full so play was pressed and we saw video from the beginning of the day, but when we tried to skip to the end of the video to see how much of the flight had been recorded, the camera
One concern is always the extreme cold at high altitudes
and that things will freeze, but everything was nice and warm when the payload container was opened with the camera and batteries dissipating about 3.6 watts. Next thing to check was if the camera was still recording and, if not, how much of the flight had been recorded and when the display screen
was opened we found that recording had already stopped due to the memory being full so play was pressed and we saw video from the beginning of the day, but when we tried to skip to the end of the video to see how much of the flight had been recorded, the camera
 locked up and refused to do anything more. Luckily, the problem was not too serious. The vacuum at 107,145 ft. had simply removed the air from under the membrane switches and air pressure was now pressing every camera
switch down simultaneously. Nothing could be done about the problem at the time, but we were confident that it would
locked up and refused to do anything more. Luckily, the problem was not too serious. The vacuum at 107,145 ft. had simply removed the air from under the membrane switches and air pressure was now pressing every camera
switch down simultaneously. Nothing could be done about the problem at the time, but we were confident that it would  be easy to fix and that the video could be recovered, so Tomoya gave a thumbs up to his camera
and we returned home. It turned out that we simply needed to wait until the next day to give air time to return under the switches and have the camera work fine again. But the once flat sheet of plastic over the switches was permanently stretched by the 14 psi of air pressure it had to deal with
and will forever remind Tomoya of his trip to Canada and his camera's trip to the edge of space.
be easy to fix and that the video could be recovered, so Tomoya gave a thumbs up to his camera
and we returned home. It turned out that we simply needed to wait until the next day to give air time to return under the switches and have the camera work fine again. But the once flat sheet of plastic over the switches was permanently stretched by the 14 psi of air pressure it had to deal with
and will forever remind Tomoya of his trip to Canada and his camera's trip to the edge of space.

 Tomoya visited many of the local attractions while he was here and became an astronaut at one.
Tomoya visited many of the local attractions while he was here and became an astronaut at one.

 Right - No one in the group had a boat or inflatable craft of any kind to use in case the payload landed in a river, lake or slough, so Garrett came prepared with what he had and displayed the compound bow he brought
with that was capable of launching an arrow with an attached line great distances over and past the payload that could then be used to snag and bring it ashore rather then someone having to get wet & swim, or whatever, to try to rescue it.
Right - No one in the group had a boat or inflatable craft of any kind to use in case the payload landed in a river, lake or slough, so Garrett came prepared with what he had and displayed the compound bow he brought
with that was capable of launching an arrow with an attached line great distances over and past the payload that could then be used to snag and bring it ashore rather then someone having to get wet & swim, or whatever, to try to rescue it.| To BEAR Home Page |